今天接着来认识一下图,结束了图的学习,数据结构的部分就告一段落了。之后就是涉及到一些基本的算法问题,感觉也会越来越难。
图
认识图
和之前的数据结构不同,图是一种非线性的结构,由顶点和边组成,以下面为例,我们可以将图G抽象的表示成一组顶点和一组边的集合:
V = {1,2,3,4,5}
E = {(1,2),(1,3),(1,5),(2,3),(2,4),(2,5),(4,5)}
G = {V,E}
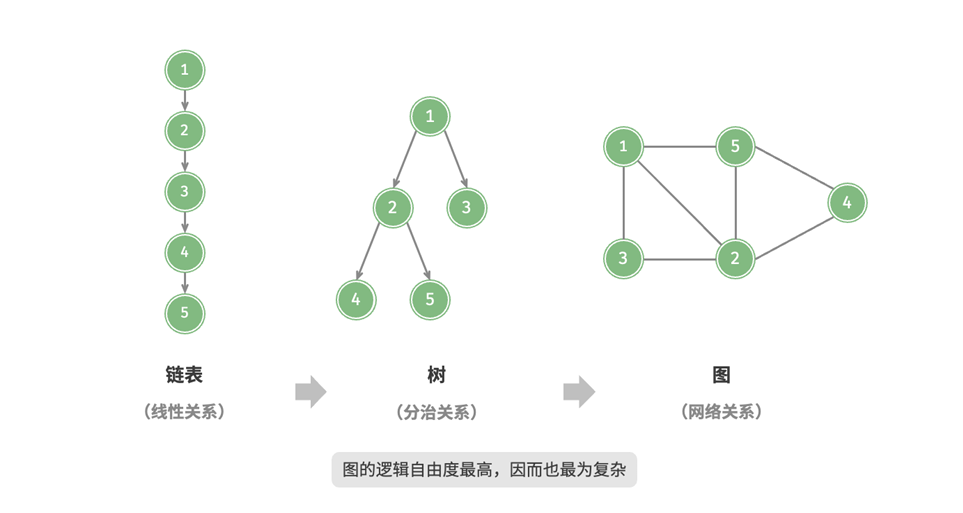
如果将顶点看作节点,将边看作连接各个节点的引用(指针),我们就可以将图看作一种从链表拓展而来的数 据结构。
图的常见类型和术语
结合不同的场景,我们可以从不同的角度对图进行分类:
- 根据边是否具有方向,分为有向图和无向图
- 根据顶点直接是否全部联通,分为联通图和非联通图
- 根据边上的权重,非为无权图和有权图
- …
在不同的场景中我们选择合适的类型,来解决问题。
图的数据结构有以下常用术语:
- **邻接:**当两顶点之间存在边相连时,称这两个顶点邻接
- **路径:**从顶点A到顶点B经过的边构成的序列被称为从A到B的路径
- **度:**一个顶点拥有的边数。对有向图,根据边的方向,还分为入度和出度。
图的表示
图通常使用两种表示方式,我们这里均以无向图为例:
邻接矩阵
设图的顶点数量为𝑛,邻接矩阵使用一个n×n大小的矩阵来表示图,每一行(列)代 表一个顶点,矩阵元素代表边,用1或0表示两个顶点之间是否存在边。
设邻接矩阵为𝑀、顶点列表为𝑉 ,那么矩阵元素𝑀[𝑖,𝑗]=1表示顶点𝑉[𝑖]到顶点𝑉[𝑗] 之间存在边,反之𝑀[𝑖,𝑗]=0表示两顶点之间无边。
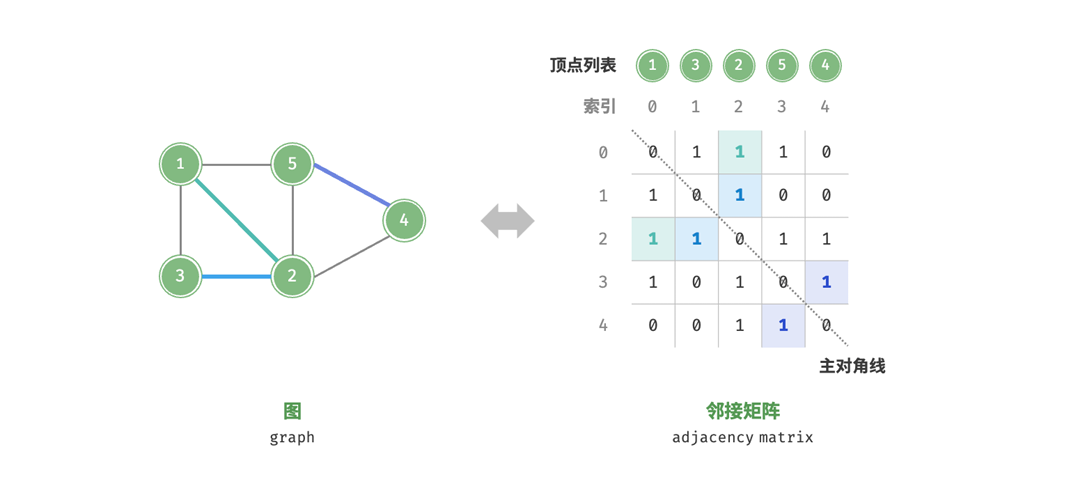
邻接矩阵有以下性质:
- 在简单图中,顶点不能和自己相连,所以邻接矩阵主对角线上的元素是没有意义的
- 对于无向图,两个方向的边等价,此时邻接矩阵关于主对角线对称
- 将邻接矩阵的元素替换成权重就是有权图
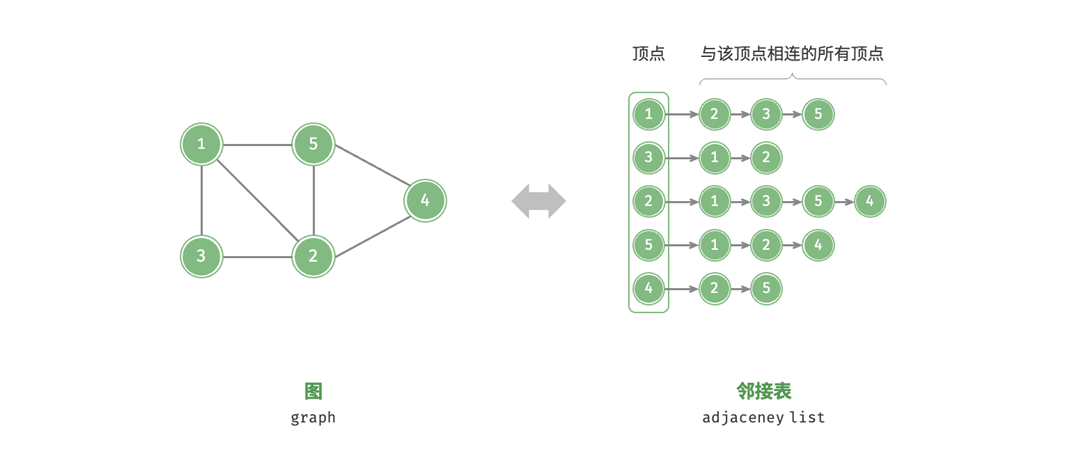
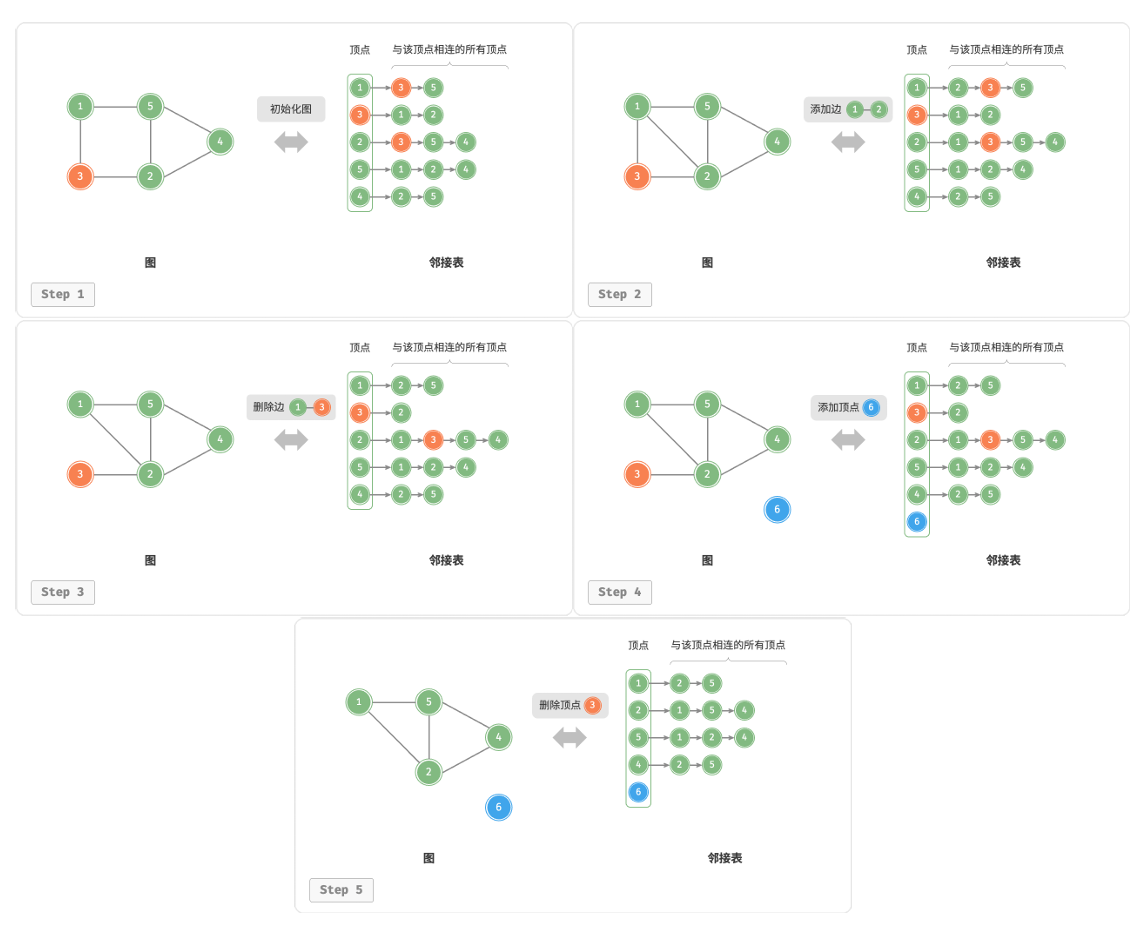
邻接表
邻接表使用n个链表来表示图,链表节点表示顶点。第i个链表对应顶点i,其中存储了该顶点的所有邻接顶点(与该顶点相连的顶点)。如下图:
两种表示方法的比较
对于邻接矩阵,我们可以直接访问矩阵元素实现对边的CRUD,时间效率高达
对于邻接表,由于表中只存储实际已存在的边数,而边数通常小于
但是结合先前的只是,对于这种链表较长的情况,我们可以将它优化成哈希表或者AVL树等结构,实现对时间效率的优化,所以对于大规模的图的使用场景,邻接表也更加普遍。
图的基本操作
图的操作主要可以分为对顶点和对边的操作,这里分别通过邻接矩阵和邻接表的方式进行实现。
基于邻接矩阵的实现
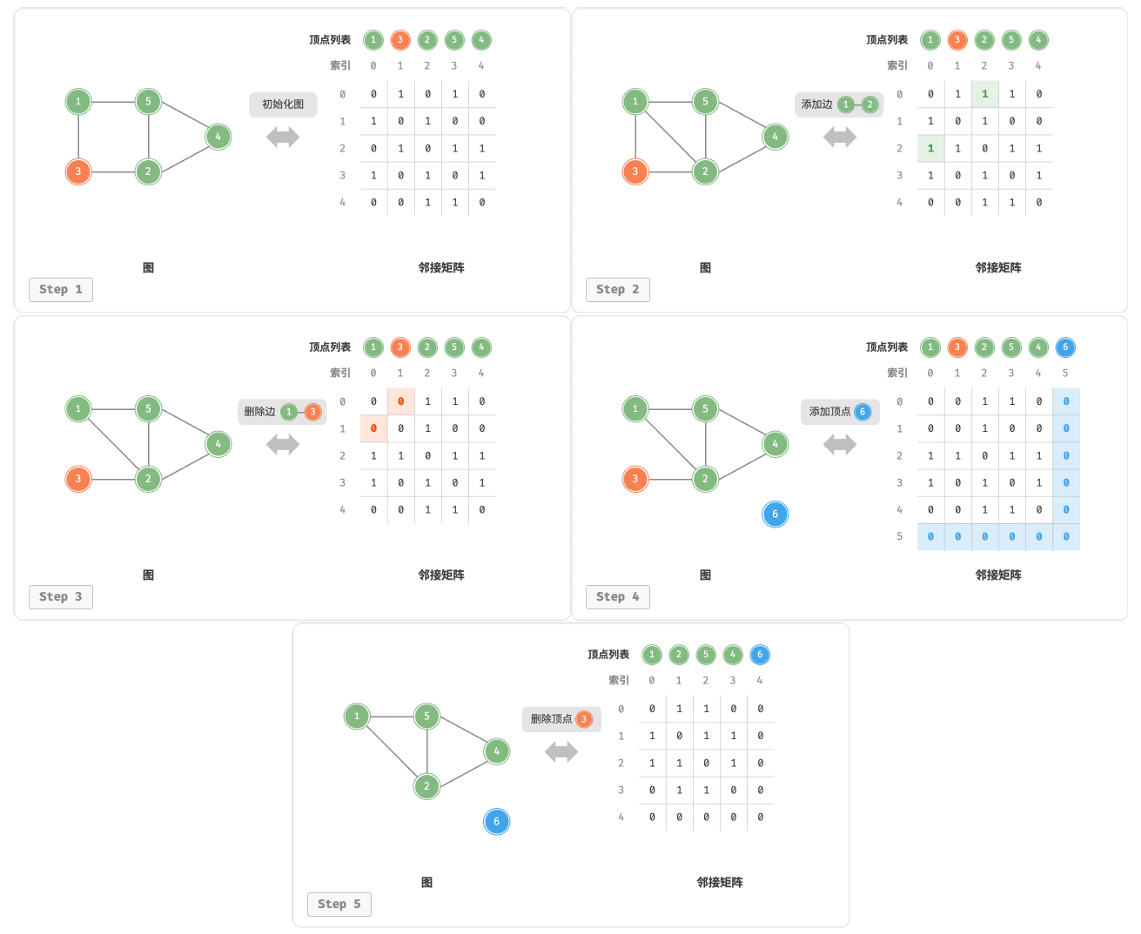
给定给一个顶点数量为n的无向图,我们需要完成以下操作:
- **添加或删除边:**直接在邻接矩阵修改指定的边,只不过要注意同时更新两个方向的边(无向图)
- **添加顶点:**在邻接矩阵的尾部添加一行一列,并初始化为0即可。
- **删除顶点:**在邻接举证中删除一行一列,将剩下的元素向左上补齐。对于最坏的情况(删除首行首列)需要移动
个元素 - **初始化:**传入n个顶点,初始化长度为n的顶点列表和nxn大小的邻接矩阵
我们的具体实现如下:
class GraphMap{
private:
vector<int> vertices; // 顶点列表
vector<vector<int>> adjMat; // 邻接矩阵
public:
GraphMap(const vector<int> &vertices, const vector<vector<int>> &edges){
for(int val : vertices)
addVertex(val);
for(const vector<int> &edge : edges)
addEdge(edge[0],edge[1]);
}
int size() const{
return vertices.size();
}
void addVertex(int val){
int n = size();
vertices.push_back(val);
// 向邻接矩阵中添加一行
adjMat.emplace_back(vector<int>(n,0));
for(vector<int> &row: adjMat)
row.push_back(0);
}
void removeVertex(int index){
if(index >= size())
throw out_of_range("顶点不存在");
vertices.erase(vertices.begin() + index);
// 删除行
adjMat.erase(adjMat.begin() + index);
// 删除列
for(vector<int> &row : adjMat)
row.erase(row.begin() + index);
}
void addEdge(int i,int j){
if(i<0 || i>=size() || j<0 || j>=size() || i==j)
throw out_of_range("顶点不存在");
adjMat[i][j] = 1;
adjMat[j][i] = 1;
}
void removeEdge(int i,int j){
if(i<0 || i>=size() || j<0 || j>=size() || i==j)
throw out_of_range("顶点不存在");
adjMat[i][j] = 0;
adjMat[j][i] = 0;
}
};
基于邻接表的实现
设无向图的顶点总数为n、边总数为m,我们需要完成以下操作:
- **添加边:**在顶点对应链表的末尾添加边就行了。但是要注意无向图要加两个方向的边
- **删除边:**在顶点管理的链表中查找并删除指定的边。无向图中删两个方向。
- **添加顶点:**在邻接表中添加一个链表,并将新增顶点作为链表头节点
- **删除顶点:**遍历整个邻接表,删除包含指定顶点的所有边
- **初始化:**在邻接表中创建n个顶点和2m条边
以下是邻接表的代码实现:
class GraphList{
private:
unordered_map<Vertex* ,vector<Vertex*>> adjList;
void remove(vector<Vertex*> &vec, Vertex* vet){
for(int i=0;i<vec.size();i++){
if(vec[i]==vet){
vec.erase(vec.begin()+i);
break;
}
}
}
public:
GraphList(const vector<vector<Vertex*>> &edges){
for(const vector<Vertex *> & edge: edges){
addVertex(edge[0]);
addVertex(edge[1]);
addEdge(edge[0],edge[1]);
}
}
int size(){
return adjList.size();
}
void addVertex(Vertex* vet){
if(adjList.count(vet))
return;
adjList[vet] = vector<Vertex*>();
}
void removeVertex(Vertex* vet){
if(!adjList.count(vet))
throw invalid_argument("不存在顶点");
adjList.erase(vet);
for(auto &adj : adjList)
remove(adj.second,vet);
}
void addEdge(Vertex* vet1, Vertex* vet2){
if(!adjList.count(vet1) || !adjList.count(vet2) || vet1==vet2)
throw invalid_argument("不存在顶点");
adjList[vet1].push_back(vet2);
adjList[vet2].push_back(vet1);
}
void removeEdge(Vertex* vet1, Vertex* vet2){
if(!adjList.count(vet1) || !adjList.count(vet2) || vet1==vet2)
throw invalid_argument("不存在顶点");
remove(adjList[vet1],vet2);
remove(adjList[vet2],vet1);
}
};
这里为了方便,我们使用动态数组代替了链表。用哈希表来表示邻接表结构。
同时需要注意在邻接表中我们使用Vertex类来表示顶点,也是为了方便。如果我们使用列表索引来区分不同德顶点的话,那么每当我们删除一个索引为i的顶点,就需要遍历整个邻接表,把所有索引大于i的顶点重新更新一遍,这样的话效率就很差。
图的遍历
树代表的是一对多的关系,图代表的是多对多的关系,所以我们可以将树视作图的一个特例。所以说树的遍历操作实际上也是图的遍历操作的一种特例。
和树类似的,我们有两种遍历方式实现对图的遍历操作:广度优先遍历和深度优先遍历
广度优先遍历
广度优先遍历是一种由近及远的遍历方式,从某个节点出发,始终优先访问距离最近的顶点,并一层层向外 扩张。以下图为例:
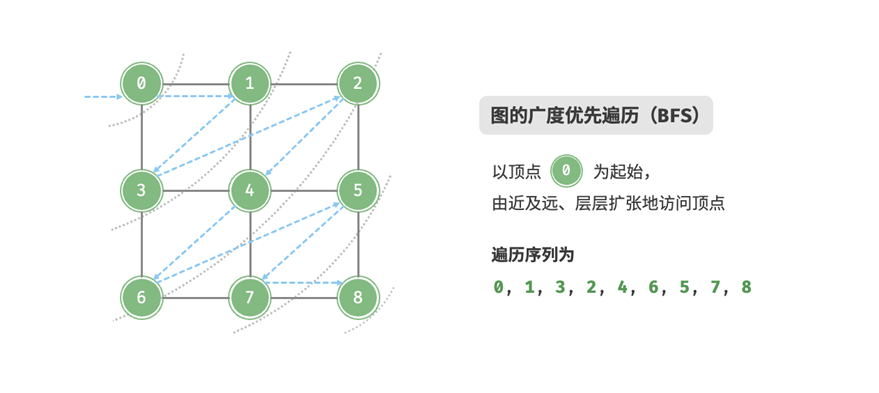
从左上角顶点出发,首先遍历该顶点的所有邻接顶点,然后遍历下一个顶点的所有邻 接顶点,以此类推,直至所有顶点访问完毕。
算法实现
BFS通常需要一个辅助队列来实现,通过队列先进先出的性质,实现BFS由近及远的思路。我们的实现流程如下:
- 将遍历起始顶点
startVet加入队列中,开始循环 - 在每次迭代中,弹出队首顶点并访问,将该顶点的所有邻接点加入到队列尾部
- 循环上一步,知道队列为空
同时我们还需要一个哈希集合visited来记录哪些节点被访问,以防止重复遍历顶点。
我们的具体实现如下:
vector<Vertex*> graphBFS(GraphList &graph, Vertex* startVet){
vector<Vertex*> res; // 返回的顶点序列
unordered_set<Vertex*> visited; // 哈希集合,用来记录被访问过的顶点
queue<Vertex*> que; // 辅助队列
que.push(startVet);
while(!que.empty()){
Vertex* vet = que.front();
que.pop();
res.push_back(vet);
for(auto adjVet : graph.adjList[vet]){
if(visited.count(adjVet))
continue; // 跳过已访问的顶点
que.push(adjVet);
visited.emplace(adjVet);
}
}
return res;
}
可以通过画图的方法帮助理解一下这个过程
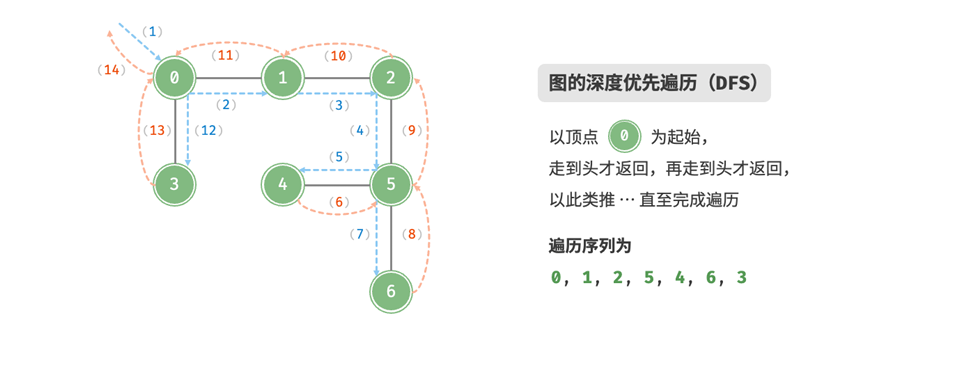
深度优先遍历
深度优先遍历是一种优先走到底、无路可走再回头的遍历方式。以下图为例
算法实现
这种走到尽头并返回的样式,我们可以通过递归的方式实现。关键在于怎么设置边界条件,退出递归。我们的实现如下:
void dfs(GraphList &graph, unordered_set<Vertex*> &visited,
vector<Vertex*> &res, Vertex * vet){
// 记录访问节点
res.push_back(vet);
// 标记已访问节点
visited.emplace(vet);
// 遍历所有邻接顶点
for(Vertex* adjVet : graph.adjList[vet]){
if(visited.count(adjVet))
continue;
// 递归访问邻接顶点
dfs(graph,visited,res,adjVet);
}
}
vector<Vertex*> graphDFS(GraphList &graph, Vertex* startVet){
// 顶点遍历序列
vector<Vertex*> res;
// 以访问过的顶点
unordered_set<Vertex*> visited;
dfs(graph,visited,res,startVet);
return res;
}
可以自己尝试手推一下这个过程,加深理解。