学到一半区研究旋转立方体去了,确实好玩,受益匪浅啊,刚好搞明白了上一章相机的设置和视图的投影,现在继续学习。
添加一个球
我们现在向我们的光线追踪器中添加一个物体。我们从添加一个球体开始(因为它是最容易分析实现的)
射线-球面的交汇
这一部分将有大量的公式,但是我现在还没有搞明白Latex的渲染问题(这个太麻烦了,我已经试过几次了),可能会用比较丑陋方式来表达或者直接上截图
我们知道球体的表达式:
1 | x^2 + y^2 + z^2 = r^2 |
当球心为C(C_x,C_y,C_z)时,我们有:
1 | (C_x - x)^2 + (C_y - y)^2 + (C_z - z)^2 = r^2 |
但是这个是数值上的运算,我们需要想办法将它转换成向量vec3的形式,这里观察可得,实际上我们可以用一点P(x,y,z)来表示球体上的任意一点,也就是说从CP向量,可以用point(C)-point(P)来表示,现在我们可以用向量的概念去理解这个式子:
1 | (point(C)-point(P))*(point(C)-point(P)) = (C_x - x)^2 + (C_y - y)^2 + (C_z - z)^2 = r^2 |
现在将射线的路径和球体的方程式联立起来:
1 | P(t) = Q + td |
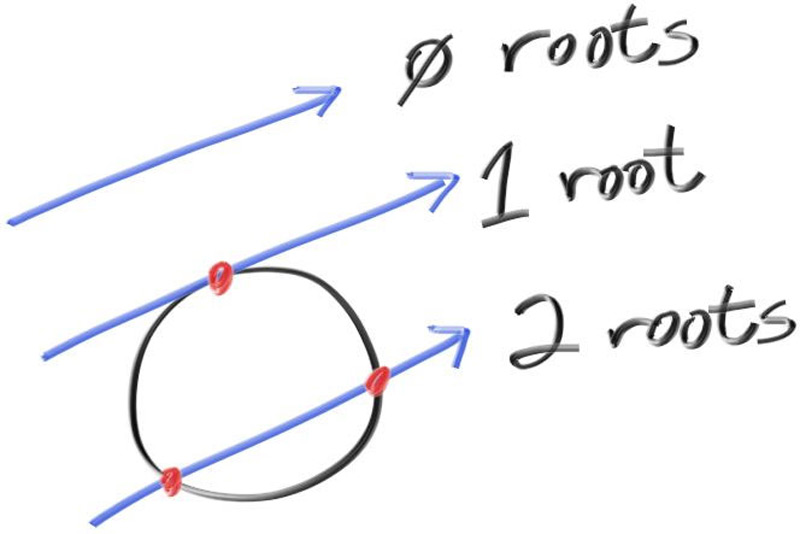
这是一个关于t的一元二次方程,我们可以根据医院二次方程的求解方程式来计算t,并得到射线与球体的相交情况(注意以下的乘法都是点乘):
1 | 求解方程式: |
带入以上的数据就可以解出t,同时可以判断光线与球体的相交情况
创建一个带有小球的光追图像
我们现在将刚刚计算得到的数学公式硬编码进入我们的程序,并设置球体的中心在(0,0,-1),半径为0.5
1 | bool hit_sphere(const point3& center,double radius,const ray& r){ |
我们将这一部分添加进入先前的代码可以得到我们渲染出来的图像,中间的红色是我们添加的球体。
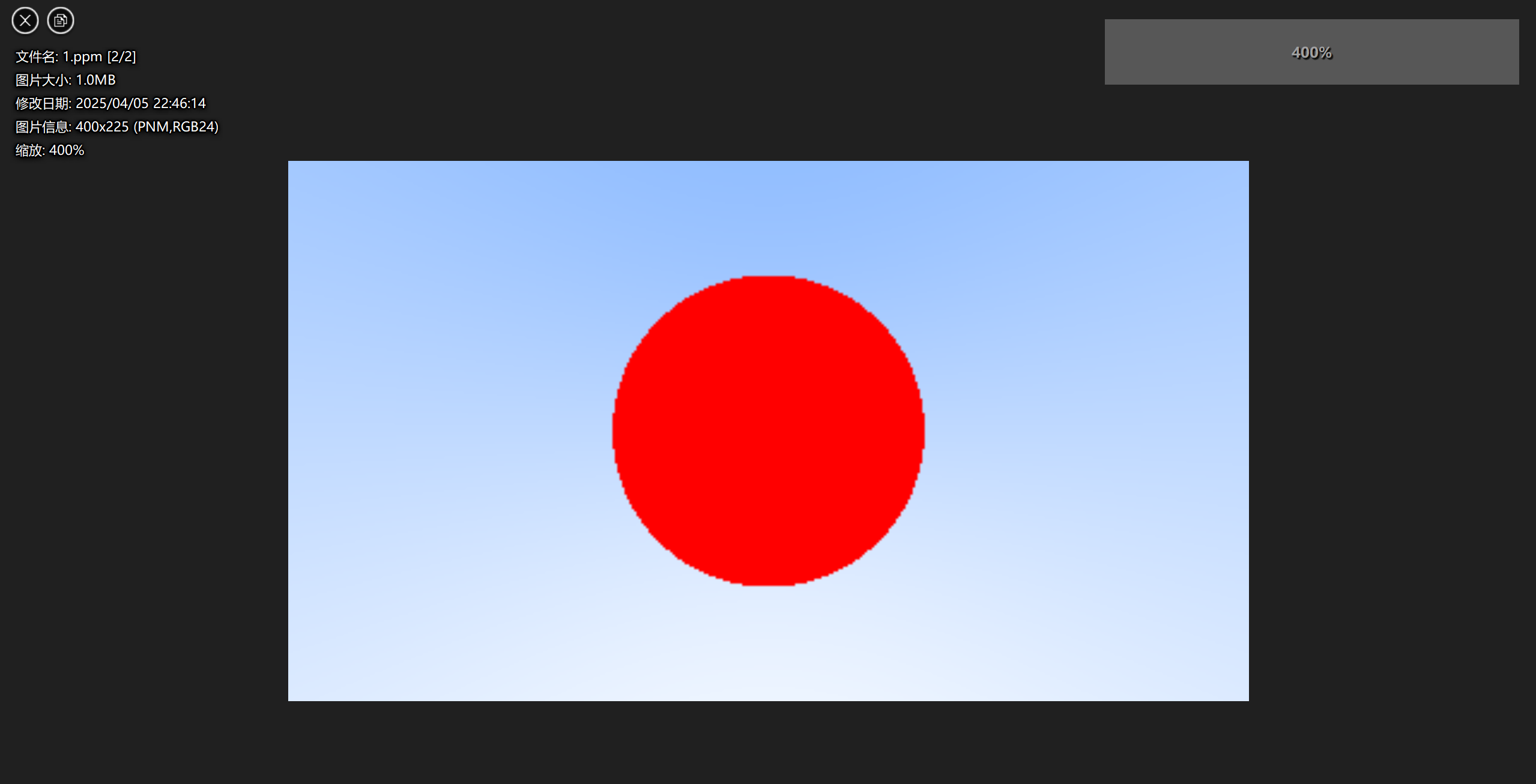
不过此时程序仍然存在一个问题,我们并不能区分摄像机前后的物体,由于射线的对称性,当球体位于(0,0,1)的时候,存在t的解为负数,导致渲染出相同的图片。
同时,我们现在还不能对物体进行前后的判断,还有阴影,反射光线等功能还有多个物体的共存,我们在接下来的学习中,慢慢尝试解决这个问题,今天就到此为止啦。